












產品目錄
產品一覽
- 壓縮空氣管理系統
- 方向控制元件
- 氣缸
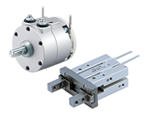
- 擺動氣缸/氣爪
- 電動執行器/電缸
- 真空用元件
- 協作機器人專用夾爪
- 小型空壓機
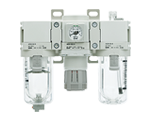
- 氣源處理元件
- F.R.L組件/壓力控制元件
- 潤滑元件
- 配管&接頭
- 壓力控制元件
- 速度控制閥
- 增壓閥
- 消音器/排氣潔凈器/氣槍/壓力計
- 靜電對策元件(靜電消除器)
- 傳感器/開關
-
產業用通信元件/無線系統
- 無線系統 對應PROFINET的元件
- 無線系統 對應EtherNet/IP的元件
- 無線系統 對應IO-Link的元件
- 無線系統 對應CC-Link的元件
- 產業用通信元件 對應PROFINET的元件
- 產業用通信元件 對應EtherNet/IP的元件
- 產業用通信元件 對應EtherCAT的元件
- 產業用通信元件 對應Modbus TCP的元件
- 產業用通信元件 對應ETHERNET POWERLINK的元件
- 產業用通信元件 對應CC-Link IE Field的元件
- 產業用通信元件 對應SSCNET III的元件
- 產業用通信元件 對應MECHATROLINK-Ⅲ的元件
- 產業用通信元件 對應PROFIsafe的元件
- 產業用通信元件 對應IO-Link的元件
- 產業用通信元件 對應PROFIBUS的元件
- 產業用通信元件 對應DeviceNet的元件
- 產業用通信元件 對應CC-Link的元件
- 產業用通信元件 對應AS-interface的元件
- 產業用通信元件 對應CANopen的元件
- 產業用通信元件 對應CompoNet的元件
- 產業用通信元件 對應Interbus的元件
- 產業用通信元件 對應MECHATROLINK-Ⅱ的元件
- 其他 對應RS232C的元件
- 其他 對應RS485的元件
- 無線系統 對應PROFINET的元件
- 化學液用閥/管接頭&針閥/管
- 流體控制元件
- 隔膜泵
- 溫控器
- 高真空元件
- 工業用過濾器/燒結金屬濾芯
- 工藝氣體元件(特氣閥)
- 過程控制元件
- 液壓元件
- 氟樹脂元件/氯乙烯元件
- 二次電池 25A-系列
課題?行業別產品
氣爪
 列表
列表 照片
照片協作機器人專用氣爪/標準型 RMHZ2

-
?將氣爪及其驅動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內置電磁閥、帶消音器節流閥、磁性開關、管接頭等
?對應12家公司的協作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標配有手動更換機構
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?采用導軌一體化構造,實現了高剛性、高精度
?采用高精度直線導軌
| 系列 | 爪數 | 外徑夾持力(N) | 內徑夾持力(N) | 開閉行程(兩側)(mm) |
|---|---|---|---|---|
| RMHZ2 | 2 | 54.2 | 72.2 | 14 |
協作機器人專用氣爪/長行程型 RMHF2

-
?將氣爪及其驅動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內置電磁閥、帶消音器節流閥、磁性開關、管接頭等
?對應12家公司的協作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標配有手動更換機構
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?64mm的長行程可對應各種工件
?高度尺寸減小約35%(與標準型相比)
?可安裝執行器位置傳感器
| 系列 | 爪數 | 外徑夾持力(N) | 內徑夾持力(N) | 開閉行程(兩側)(mm) |
|---|---|---|---|---|
| RMHF2 | 2 | 90 | 90 | 64 |
協作機器人專用氣爪/3爪型 RMHS3

-
?將氣爪及其驅動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內置電磁閥、帶消音器節流閥、磁性開關、管接頭等
?對應12家公司的協作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標配有手動更換機構
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?適合圓筒形工件的軸向夾持
| 系列 | 爪數 | 外徑夾持力(N) | 內徑夾持力(N) | 開閉行程(兩側)(mm) |
|---|---|---|---|---|
| RMHS3 | 3 | 118 | 130 | 8 |
多夾爪適配器 RMMA

| 系列 | 安裝角度 | 最大可搬運重量(kg) |
|---|---|---|
| RMMA | 90°,120°,180° | 20 |
協作機器人專用電動真空夾爪 ZXPE5

-
?無需氣源的真空夾爪
?僅需連接電氣配線接頭即可動作
內置真空泵,可在沒有氣源的地方使用
?將吸附所需的周邊元件單元化
集真空泵、大氣開放閥、壓力顯示器、吸盤于一體
?消耗電流最多削減64%
自動/手動模式,實現節能運行
?輕量:556g
?豐富的吸盤擴展品對應各種各樣的工件形狀
?安裝規格:符合ISO9409-1-50-4-M6
最大吸入流量*1 根據本公司測定條件確定的夾爪運行模式:連續模式下的數值(真空泵連續運行狀態)。可能因大氣壓(天氣、海拔等)和測量方法而異。
最大可搬運重量*2 受吸盤直徑、安裝姿勢和工件的限制。本產品請在最大可搬運重量以下使用。如果超過最大可搬運重量吸附?搬運,可能會造成主體故障及工件掉落。
| 系列 | 吸盤形狀 | 吸盤直徑 | 最大吸入流量*1 [L/min(ANR)] | 最大可搬運重量*2 [Kg] |
|---|---|---|---|---|
| ZXPE5 | 平型 平型帶肋 風琴型 薄型 多段風琴型 2.5段風琴型 5.5段風琴型 薄膜包裝工件用平型 | φ8~φ32 | 4.5 | 5 |

