


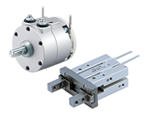










協(xié)作機器人用氣爪
 列表
列表 照片
照片協(xié)作機器人用氣爪單元(發(fā)那科CRX系列用) JMHZ2-X7400B-CRX

-
?即插即用
對應(yīng)FANUC CRX插入式軟件,編程簡單
?采用空氣驅(qū)動,體積小、重量輕,夾持力更高
?導(dǎo)向機構(gòu)一體化構(gòu)造,實現(xiàn)高剛性、高精度
采用高精度直線導(dǎo)軌,重復(fù)精度:±0.01mm
采用更高等級的直線導(dǎo)軌,剛性提高
?只需連接1跟供氣管和M8電氣配線接頭即可工作
?電磁閥、速度調(diào)節(jié)機構(gòu)、磁性開關(guān)一體化
?采用分離式保護罩氣爪的維護更容易
?安裝規(guī)格:ISO9409-1-50-4-M6
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-16D-X7400B-CRX | 16 |
協(xié)作機器人用氣爪單元(三菱電機、MELFA用) ASSISTA系列 JMHZ2-X7400B-ASSISTA

-
?采用空氣驅(qū)動,體積小、重量輕,夾持力更高
?導(dǎo)向機構(gòu)一體化構(gòu)造,實現(xiàn)高剛性、高精度
采用高精度直線導(dǎo)軌 重復(fù)精度:±0.01mm
采用更高等級的直線導(dǎo)軌,剛性提高
?只需連接1跟供氣管和M12電氣配線接頭即可工作
?電磁閥、速度調(diào)節(jié)機構(gòu)、磁性開關(guān)一體化
?采用分離式保護罩氣爪的維護更容易
?安裝規(guī)格:ISO9409-1-31.5-4-M5
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-16D-X7400B-ASSISTA | 16 |
協(xié)作機器人用氣爪單元(歐姆龍、TECHMAN ROBOT Inc.用) TM系列 JMHZ2-X7400B-TM

-
?即插即用
對應(yīng)TM Componen 簡單編程
?采用空氣驅(qū)動,體積小、重量輕,夾持力更高
?導(dǎo)向機構(gòu)一體化構(gòu)造,實現(xiàn)高剛性、高精度
采用高精度直線導(dǎo)軌 重復(fù)精度:±0.01mm
采用更高等級的直線導(dǎo)軌,剛性提高
?只需連接1跟供氣管和M8電氣配線接頭即可工作
?電磁閥、速度調(diào)節(jié)機構(gòu)、磁性開關(guān)一體化
?采用分離式保護罩氣爪的維護更容易
?安裝規(guī)格:ISO9409-1-31.5-4-M5
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-16D-X7400B-TM | 16 |
協(xié)作機器人專用氣爪(優(yōu)傲機器人用) JMHZ2-X7400B

-
?Plug &Play,可立即使用
對應(yīng)URCap,編程簡單
?空氣驅(qū)動,體積小重量輕,但夾持力大
?配備1根供氣管,連接M8電氣配線接頭即可動作
?將電磁閥、速度調(diào)節(jié)機構(gòu)一體化
?安裝規(guī)格:ISO9409-1-50-4-M6
| 形式 | 系列 | 缸徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-16D-X7400B | 16 |
協(xié)作機器人用氣爪單元(安川電機、MOTOMAN-HC用) JMHZ2-X7400B-DTP/HC10DT/HC10

-
?采用空氣驅(qū)動,體積小、重量輕,夾持力更高
?只需連接1跟供氣管和M12電氣配線電纜即可工作
?電磁閥、速度調(diào)節(jié)機構(gòu)、磁性開關(guān)一體化
?導(dǎo)向機構(gòu)一體化構(gòu)造,實現(xiàn)高剛性、高精度
采用高精度直線導(dǎo)軌 重復(fù)精度:±0.01mm
采用更高等級的直線導(dǎo)軌,剛性提高
?分采用分離式保護罩氣爪的維護更容易
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-16D-X7400B-DTP JMHZ2-16D-X7400B-HC10DT JMHZ2-16D-X7400B-HC10 | 16 |
協(xié)作機器人用 磁力吸附單元
適合川崎重工duAro1、2系列 JMHZ2-X7500-KA

-
?空氣驅(qū)動,體積小、重量輕但夾持力大
?導(dǎo)向機構(gòu)一體化構(gòu)造,實現(xiàn)了高剛性、高精度
采用高精度直線導(dǎo)軌:重復(fù)定位精度:±0.01mm
采用更高等級的直線導(dǎo)軌:剛性提高
?速度調(diào)節(jié)機構(gòu)一體化
?采用分離式防護罩,易于維護夾爪
?可選擇是否帶安裝件、防護罩、磁性開關(guān)
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-X7400-KA | 16 |
協(xié)作機器人用氣爪單元
適合卡瓦達機器人、NEXTAGE JMHZ2-X7500-KR

-
?采用空氣驅(qū)動,體積小重量輕,但夾持力大
?氣爪導(dǎo)向機構(gòu)一體化,保證了高剛性、高精度
?采用高剛性直線導(dǎo)軌
?重復(fù)精度:±0.01mm
?速度調(diào)節(jié)機構(gòu)一體化
?采用分離式防護罩,可對氣爪進行維護
?可選擇是否帶有連接件、防護罩、磁性開關(guān)
?安裝規(guī)格:符合ISO9409-1-50-4-M6標(biāo)準
| 形式 | 系列 | 缸筒內(nèi)徑(mm) |
|---|---|---|
| 協(xié)作機器人用 | JMHZ2-X7500-KR | 16 |
協(xié)作機器人專用氣爪/長行程型 RMHF2

-
?將氣爪及其驅(qū)動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內(nèi)置電磁閥、帶消音器節(jié)流閥、磁性開關(guān)、管接頭等
?對應(yīng)12家公司的協(xié)作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標(biāo)配有手動更換機構(gòu)
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?64mm的長行程可對應(yīng)各種工件
?高度尺寸減小約35%(與標(biāo)準型相比)
?可安裝執(zhí)行器位置傳感器
| 系列 | 爪數(shù) | 外徑夾持力(N) | 內(nèi)徑夾持力(N) | 開閉行程(兩側(cè))(mm) |
|---|---|---|---|---|
| RMHF2 | 2 | 90 | 90 | 64 |
協(xié)作機器人專用氣爪/3爪型 RMHS3

-
?將氣爪及其驅(qū)動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內(nèi)置電磁閥、帶消音器節(jié)流閥、磁性開關(guān)、管接頭等
?對應(yīng)12家公司的協(xié)作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標(biāo)配有手動更換機構(gòu)
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?適合圓筒形工件的軸向夾持
| 系列 | 爪數(shù) | 外徑夾持力(N) | 內(nèi)徑夾持力(N) | 開閉行程(兩側(cè))(mm) |
|---|---|---|---|---|
| RMHS3 | 3 | 118 | 130 | 8 |
協(xié)作機器人專用氣爪/標(biāo)準型 RMHZ2

-
?將氣爪及其驅(qū)動元件集成為1個單元
僅需連接1根供氣管和1根電氣配線即可工作
內(nèi)置電磁閥、帶消音器節(jié)流閥、磁性開關(guān)、管接頭等
?對應(yīng)12家公司的協(xié)作機器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
?標(biāo)配有手動更換機構(gòu)
簡單操作,即可更換工具,可減少工時
?空氣消耗量最多減少80%
?采用導(dǎo)軌一體化構(gòu)造,實現(xiàn)了高剛性、高精度
?采用高精度直線導(dǎo)軌
| 系列 | 爪數(shù) | 外徑夾持力(N) | 內(nèi)徑夾持力(N) | 開閉行程(兩側(cè))(mm) |
|---|---|---|---|---|
| RMHZ2 | 2 | 54.2 | 72.2 | 14 |

