









電動執(zhí)行器
» 用語集

▼首字母搜索
【S】●S型曲線驅(qū)動方式
在加速域初期和鄰近減速結(jié)束時(shí)減小加速度,而增加在中間領(lǐng)域的加速度的方式。這種驅(qū)動方式可以減緩加減速時(shí)的沖擊,適合需要平穩(wěn)運(yùn)動的場合。
●伺服關(guān)閉
伺服結(jié)構(gòu)中,不受控的狀態(tài)。
●伺服開啟
伺服結(jié)構(gòu)中,受控制的狀態(tài)。
●伺服解除(伺服關(guān)閉)
電機(jī)電源關(guān)閉的狀態(tài)。滑塊可以自由活動。
●伺服電機(jī)
使用伺服機(jī)構(gòu)的電機(jī)的總稱。通常此類電機(jī)具有高速響應(yīng)的特點(diǎn),通過位置檢測器(如:編碼器等)的反饋控制等來追蹤目標(biāo)值。可實(shí)現(xiàn)位置控制、速度控制、推力控制等。
●伺服鎖定(伺服開啟)
電機(jī)電源接通的狀態(tài)。只要伺服機(jī)構(gòu)定位指令保持不變,即使受到外部干擾(如:外力等) 伺服機(jī)構(gòu)也能保持其位置。
●順序控制
按預(yù)先規(guī)定的順序或方式,自動進(jìn)行各階段的控制的控制方式。
●瞬時(shí)最大力矩
伺服電機(jī)短時(shí)間內(nèi)可以產(chǎn)生的最大力矩。
●SCARA
SCARA是Selective Compliance Assembly Robot Arm的縮寫,是一種僅在特定方向(水平方向)具有順從性,垂直方向具有較高的剛度的機(jī)器手臂。
●相對位置
Incremental。距離設(shè)定的任意點(diǎn)的位置。反義詞是絕對位置(Absolute)。
●示教
指存儲動作、位置等的程序的制作方法。
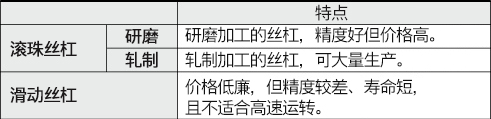
●絲杠的種類
將電機(jī)旋轉(zhuǎn)運(yùn)動轉(zhuǎn)換為直線運(yùn)動的絲杠,分為以下幾類。